Info
Getting Here
Hours
Directory
All Stores
Save
Eat & Drink
Directory Map
Entertainment
Movies
Events
Trending
Love it!
On Sale
Women
Men
Baby & Kids
Beauty
Home
BIPOC
Gift Guide
Stores
Brands
Wishlist
Wishlist
Items on Sale
Clothing
Tops
Bottoms
Outerwear
Swimwear
Sleepwear
Underwear
Dresses & Jumpsuits
Accessories
Socks
Hosiery
Hats
Headbands
Scarves
Gloves & Mittens
Sunglasses
Eyeglasses
Belts
Wallets
Watches
Jewelry
Shoes
Sneakers
Boots
Sandals
Flip Flops
Pumps
Flats
Shoe Care
Bags & Backpacks
Satchel
Messenger
Saddle
Tote
Duffel
Hobo
Clutch
Sports & Fitness
Yoga
Gym
Outdoor
Sportswear
Items on Sale
Clothing
Tops
Bottoms
Outerwear
Swimwear
Sleepwear
Underwear
Accessories
Socks
Hats
Headbands
Scarves
Gloves & Mittens
Sunglasses
Eyeglasses
Belts
Ties
Wallets
Watches
Jewelry
Shoes
Sneakers
Boots
Sandals
Flip Flops
Dress Shoes
Shoe Care
Bags & Backpacks
Messenger
Duffel
Briefcase
Luggage
Sports & Fitness
Gym
Outdoor
Sportswear
Items on Sale
Clothing
Tops
Bottoms
Outerwear
Sleepwear
Underwear
Baby Gear
Strollers
Carriers
Feeding
Seats
Cribs
Toys
Video Games
Building Toys
Puzzles
Dolls
Play Sets
Stuffed Toys
Costumes
Items on Sale
Skincare
Face Scrubs
Facial Cleansers
Essential Oils
Bath Salts
Body Wash
Makeup Remover
Moisturizers
Face Serums
Shaving Treatments
Toner
Sunscreen
After Sun Care
Makeup
Face
Eyes
Lips
Tools
Hair
Shampoo
Conditioner
Hair Treatment
Hair Color
Hair Brush
Hair Tie
Hair Towel
Hair Curler
Straightener
Hair Dryer
Nails
Nail Polish
Nail File
Items on Sale
Bedroom
Bed Sheets
Pillows
Mattress
Mattress Cover
Kitchen
Cookware
Utensils
Appliances
Office
Stationery
Paper Products
Decor
Candles
Rugs
Vase
Curtains
Wall Art
Furniture
Chairs
Sofas
Benches
Desks
Shelves
Mirrors
Electronics
Laptops
Monitors
Mice
Headphones
Speakers
Home Theatre
Cables
Batteries
Cases
Cameras
Men's Gift Guide
Women's Gift Guide
Kids' Gift Guide
Gifts Under $100
Gifts Under $50
Abercrombie & Fitch
Aerie
Allen Edmonds
Alo Yoga
Altar'd State
American Eagle Outfitters
Ann Taylor
Anthropologie
Apple
Athleta
Barnes and Noble
Bath & Body Works
Belk
Boss
Brighton
Buckle
Carhartt
Chico's
Dear Prudence
Evereve
Fabletics
Frances Valentine
Free People
Gorjana
Kendra Scott
Levi's
Loft
Lululemon
Lush
Madewell
Mizzen+Main
Mountain High Outfitters
Nike
Pandora
REI Co-Op
Rowan
Saks Fifth Ave
Sephora
Soma
Sunglass Hut
Swarovski
The Normal Brand
Tommy John
Tory Burch
TRAVIS MATHEW
Ulta Beauty
UNTUCKit
Urban Outfitters
Victoria's Secret
Vineyard Vines
Aerie
Altar'd State
Apple
Athleta
Brighton
Chico's
Evereve
Kate Spade
Kendra Scott
L'Occitane
Lush Fresh Handmade Cosmetics
Mac Cosmetics
Madewell
Sephora
Soma
Tory Burch
Ulta
Urban Outfitters
Close Button
Wishlist
Search
All Categories
Close Button
On Sale
Women
Men
Baby & Kids
Beauty
Home
BIPOC
Gift Guide
Stores
Brands
Search thousands of in stock products from The Summit
The following text field will produce suggestions that follow it as you type.
Close Button
Search
Home
Barnes and Noble
Modeling, Simulation and Optimization of Bipedal Walking
Unfortunately, this item is no longer available, but we found some similar items you might like.
You May Also Like
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
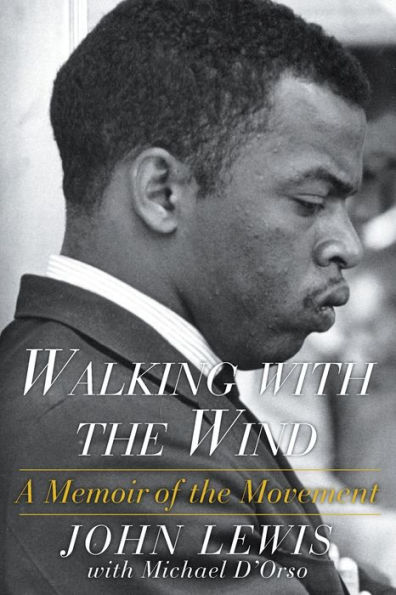
Walking with the Wind: A Memoir of the Movement
Barnes & Noble
Current price:
$22.00
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
Things Become Other Things: A Walking Memoir
Barnes & Noble
Current price:
$18.00
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
Model [Sea Blue Vinyl] [Barnes & Noble Exclusive]
Barnes & Noble
Current price:
$26.99
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
A Philosophy of Walking
Barnes & Noble
Current price:
$15.99
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
Churchill: Walking with Destiny
Barnes & Noble
Current price:
$45.00
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
Devotional Walking With God
Barnes & Noble
Current price:
$16.99
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
Walking with the Savior - Devotional
Barnes & Noble
Current price:
$4.99
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
The Walking Dead Compendium, Volume 2
Barnes & Noble
Current price:
$59.99
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
Wanderlust: A History of Walking
Barnes & Noble
Current price:
$20.00
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
James: Walking in Wisdom
Barnes & Noble
Current price:
$14.99
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
The Walking Dead: Dead City: S
Barnes & Noble
Current price:
$34.99
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
Glitz Casual Slip-on Walking Shoes
Belk
Current price:
$69.00
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
Abundant Grace: 40 Days of Walking the Goodness God: A Devotional
Barnes & Noble
Current price:
$18.00
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
The Walking Dead Compendium, Volume 4
Barnes & Noble
Current price:
$59.99
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
Somebody Is Walking on Your Grave: My Cemetery Journeys
Barnes & Noble
Current price:
$24.00
Wishlist
Add To Wishlist
Quick View
Loading Inventory...
Loading Inventory...
Sarah Eisenlohr Walking Into Leaves Art Print
Urban Outfitters
Current price:
$49.00


![Model [Sea Blue Vinyl] [Barnes & Noble Exclusive]](https://prodimage.images-bn.com/pimages/0075678609374_p0_v5_s600x595.jpg)